ในหัวข้อนี้จะกล่าวถึง
- ระบบคาน 3 รูปแบบในทางกลศาสตร์ที่มีความได้เปรียบและเสียเปรียบของแรงที่แตกต่างกัน
- มุมมองเมื่อเปรียบการออกแรงของกล้ามเนื้อในร่างกายมนุษย์เทียบกับรูปแบบของระบบคานทั้ง 3 รูปแบบ
- ข้อจำกัดเมื่อนำมาเทียบกับระบบกลไกการออกแรงในมนุษย์ที่มีความสลับซับซ้อน
- การมองข้อต่อในร่างกายมนุษย์ที่เป็นลำดับและมีผลเกี่ยวเนื่องกันเสมือนลูกโซ่ (Chain)
- การนำระบบคานมาพิจารณาเครื่องออกกำลังกาย (Gym Machine)
ความหมายของ Lever System
ระบบคานเป็นหนึ่งในเครื่องกลอย่างง่าย (Simple Machines) ซึ่งเป็นเครื่องกลที่ช่วยผ่อนแรงในการทำงาน เมื่อเราพูดถึงระบบคานนั้นจะหมายถึง “ระบบ” จริงๆที่จะบ่งบอกว่า แรงที่เราใส่เข้าไปในระบบนั้น ได้เปรียบหรือเสียเปรียบอย่างไร ระบบคานที่ใช้สำหรับยกตัวอย่างใน “เครื่องกลอย่างง่าย” โดยทั่วไปจะประกอบไปด้วย
- Rigid Lever (Straight) หรือ คานที่แข็งและมี “ลักษณะตรง”
- Fulcrum หรือ จุดหมุน
- Parallel Force หรือ แรงที่ “ขนานกัน”
- Load หรือ แรงที่เราต้องการเอาชนะ
- Effort หรือ แรงพยายาม
Mechanical Advantage and Classes of Lever
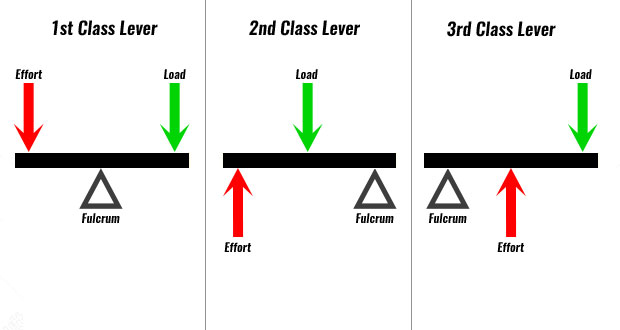
ความได้เปรียบเชิงกล ในระบบคาน 3 รูปแบบ
- รูปแบบที่ 1 คือ Load และ Effort อยู่ในด้านตรงข้ามกันระหว่างจุดหมุน เมื่อให้แรงทั้งสองมีขนาดที่เท่ากัน ความได้เปรียบจะเป็นของฝั่งที่อยู่ไกลจากจุดหมุนมากกว่า
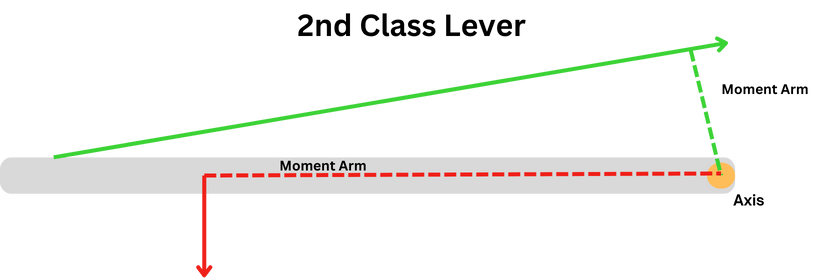
- รูปแบบที่ 2 คือ Load อยู่ฝั่งเดียวกับ Effort และ Load นั้นอยู่ใกล้จุดหมุนมากกว่า Effort ทำให้ Effort ได้เปรียบ
- รูปแบบที่ 3 คือ Load อยู่ฝั่งเดียวกับ Effort แต่ Effort นั้นอยู่ใกล้จุดหมุนมากกว่า Load ทำให้ Effort เสียเปรียบ
3 Lever Classes in Human Body (as historically taught)
จากที่ได้เราเคยศึกษากันมา การยกตัวอย่างรูปแบบของคานในมนุษย์ มักจะหนีไม่พ้นการเปรียบเทียบกลุ่มกล้ามเนื้อ สามกลุ่มกับระบบคาน 3 แบบดังนี้

ระบบคานที่อยู่ในมนุษย์รูปแบบที่ 1 เปรียบเทียบ Effort เป็นกลุ่มกล้ามเนื้อ Neck Extensors (ผู้เขียนอนุมานว่าในรูปเป็น Semispinalis นอกเหนือไปจาก Trapezius) โดยมีจุดหมุนเป็น Occipital Condyles (ดูตำแหน่งในรูปประกอบ) และ Load คือน้ำหนักของหัว
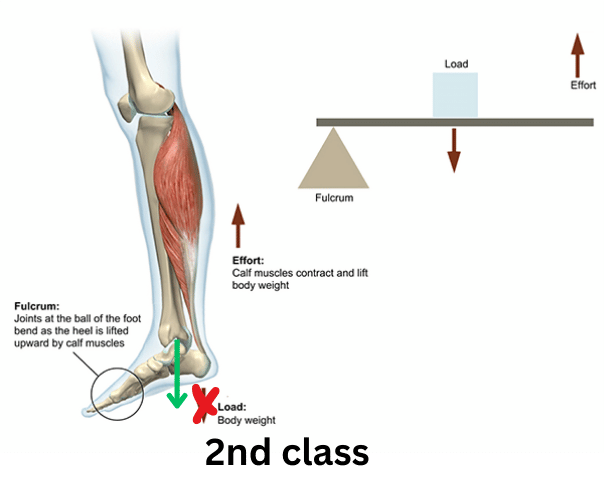
ระบบคานที่อยู่ในมนุษย์รูปแบบที่ 2 เปรียบเทียบ Effort เป็นกลุ่ม Plantar Flexors (หรือมักอ้างอิงเฉพาะ Gastrocnemius บ่อยครั้ง) ที่มีน้ำหนักตัวเป็น Load และ จุดหมุนอยู่ที่ปุ่มโคนหัวแม่เท้า (Ball of the Foot) *สังเกตุว่าจุดหมุนในกรณีนี้จะแตกต่างจากปกติที่ จุดหมุน มักจะถูกกำหนดโดยเป็นจุดของข้อต่อที่กล้ามเนื้อข้ามไปเกาะ
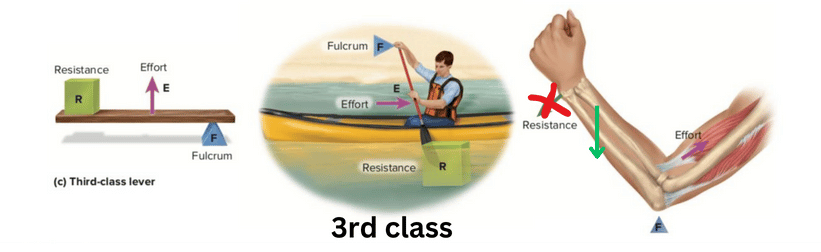
ระบบคานที่อยู่ในมนุษย์รูปแบบที่ 3 มักเปรียบเทียบให้กล้ามเนื้อ Biceps เป็น Effort โดยมีจุดหมุนที่ข้อศอก และ Load อยู่ที่ปลายแขน
ทำความรู้จักเรื่อง Relative Distance and Speed Advantage
ในระบบคานรูปแบบที่ 3 ที่แรงพยายาม (Effort) มีความเสียเปรียบเชิงกล แต่กลับได้สิ่งที่ทดแทนมาคือ
1.ความเร็วเชิงมุม (Angular Speed)
2.ระยะทาง (Distance)
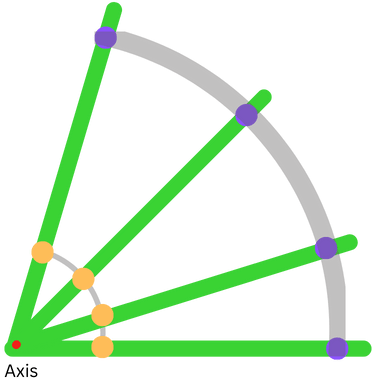
สังเกตุการเปรียบเทียบการเคลื่อนที่ระหว่างลูกบอลสีเหลือง กับ ลูกบอลสีม่วง ที่อยู่บนคานเดียวกัน
สมมติว่าเรากำหนดเวลาการเคลื่อนที่ของคานนี้เป็นเวลา 3 วินาที จะพบว่าในสามวินาทีนี้ ลูกบอลสีม่วง ทำระยะทางไปได้เยอะกว่าลูกบอลสีเหลืองบนคานเดียวกัน และลูกบอลสีม่วงต้องเคลื่อนที่ด้วยความเร็วที่มากกว่าลูกบอลสีเหลือง (ต้องทำระยะทางที่มากกว่าโดยเมื่อกำหนดเวลาที่เท่ากัน จึงต้องมีความเร็วที่มากกว่า)
ทีนี้เราลองจินตนาการเปรียบเทียบลูกบอลสีเหลือง เป็นจุดเกาะของ Biceps และ ลูกบอลสีม่วง เป็นปลายแขน จะพบว่าจากจุดเกาะ เมื่อขยับเพียงนิดเดียว ก็สามารถทำให้ปลายแขนของเราเคลื่อนที่เป็นระยะทางที่มากได้
Why Lever Class in Human Body Doesn’t Matter
หลังจากนี้ผู้เขียนจะขอเรียก
- แรงพยายามของกล้ามเนื้อว่า Effort แทนด้วย ลูกศร สีเขียว
- เรียกแรงต้าน (Load) ว่า Resistance แทนด้วย ลูกศร สีแดง
• เราไม่สามารถเปลี่ยนจุดเกาะ (Muscle Attachment) ของกล้ามเนื้อได้
• แนวแรงจากกล้ามเนื้อ(effort) และ resistance (load) ไม่ได้เป็น Parallel Force หรือขนานต่อกัน จึงไม่ได้การันตี ความได้เปรียบทางกลศาสตร์
• สำหรับคนที่ออกกำลังกายเพื่อสร้างกล้ามเนื้อ (Hypertrophy) เราให้ความสำคัญกับการ “ทำให้กล้ามเนื้อเกิดการพัฒนา” (Challenge) มากกว่าความได้เปรียบของ Effort (Leverage) *ยกเว้นกรณี Stretegic Cheating หรือเรียกได้ว่า การโกงอย่างมีเป้าหมาย ตัวอย่างเช่นการลด Moment Arm ของท่าออกกำลังกายเพื่อใช้เป็น Drop Set เป็นต้น
แรง Resistance(Load) สามารถเลื่อนตำแหน่งได้ ทำให้ Class เปลี่ยนแปลง
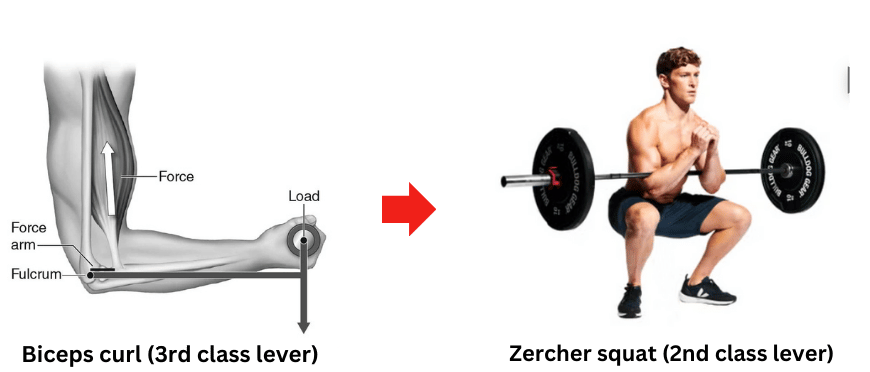
ในทางปฏิบัติแล้ว ถึงแม้ Zercher Squat จะไม่ใช่การฝึกกล้ามเนื้อ Biceps แต่ในกรณีนี้เมื่อพิจารณาเฉพาะกล้ามเนื้อ Biceps และตำแหน่งของ Resistance จะถือว่าได้เปรียบเชิงกล ผู้เขียนพยายามชี้ให้เห็นถึง การผูกติดว่า กล้ามเนื้อใดเป็น Lever Class ประเภทไหนไม่สามารถทำได้เสมอไป
นอกจากนี้การพิจารณา Lever Class กับกล้ามเนื้อที่ไม่ใช่กล้ามเนื้อหลักในการเคลื่อนไหว (มีจุดเกาะที่ไกลออกไป) Lever Class สามารถเปลี่ยนได้โดยง่าย ดังนั้นจึงเกิดคำถามที่ว่า เราควรพิจาณา จากแรงลัพธ์ (Resultant) ของกลุ่มกล้ามเนื้อทั้งหมดที่ช่วยในการยก หรือ เฉพาะกล้ามเนื้อหลักที่มีส่วนในการยกมากที่สุด (Prime Mover)
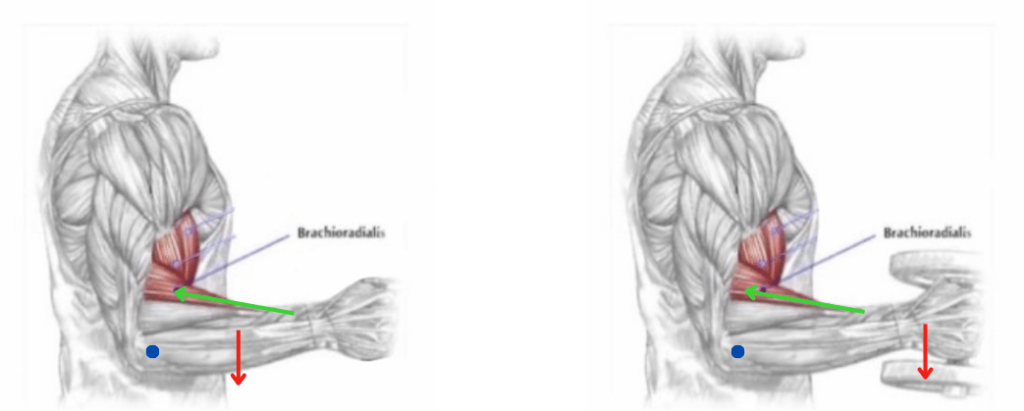
ตัวอย่างการพิจารณาเฉพาะ กล้ามเนื้อ Brachioradialis ในท่า Hammer Curl ทั้งที่ถือและไม่ถือ Dumbbell พบว่าในรูปแรก จะนับว่า Center of Mass ของแขนท่อนปลาย (Forearm) เป็น Resistance ซึ่งจะจัดว่าเป็นระบบคานรูปแบบที่ 2 และในรูปที่สอง แรงต้านจะอยู่ไกลออกไปเนื่องจากน้ำหนักของ Dumbbell ที่เพิ่มเข้ามา กรณีนี้ทำให้เป็นระบบคานรูปแบบที่ 3
Only Moment Arm Matters
Moment Arm เท่านั้นที่สำคัญ!
อย่างที่เกริ่นไปในตอนต้นถึงการยกตัวอย่างที่ใช้ในเรื่อง “เครื่องกลอย่างง่าย” ที่มักจะเปรียบเทียบ “แรงกระทำที่ขนานกัน” แต่ในความเป็นจริง แรงที่กระทำต่อคานนั้น สามารถที่จะเป็นแรงที่ไม่ขนานกันได้
จากตัวอย่าง
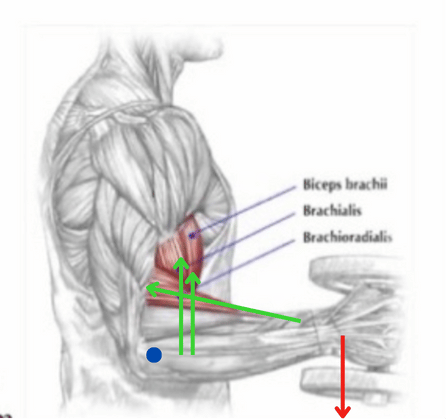
ระบบคานในรูปเป็นระบบคานรูปแบบที่ 2 แต่เมื่อพิจารณาจาก Moment Arm เทียบกันระหว่างสองแรงแล้ว พบว่า แรง Effort (สีเขียว) ที่อยู่ไกลออกไปจากจุดหมุนมากกว่า ไม่มีความได้เปรียบเชิงกลต่อแรง Load สีแดง
กล้ามเนื้อทำงานออกแรงร่วมกัน การแยกพิจารณาเฉพาะส่วนจึงยากในเชิงปฏิบัติ
ความคลุมเครือในการกำหนด Class และจุดหมุน

Foot Plate ในเครื่อง Leg Press ของ Hoist นั้นสามารถขยับได้ (ตัวคนไม่ขยับ) เมื่อมองในรูปแบบนี้เราสามารถกำหนดให้ Talocrural Joint เป็นจุดหมุนได้ ทำให้ Calf Press ในรูปด้านบนเป็น ระบบคานรูปแบบที่ 1

ทีนี้เรามาลองพิจาณา Foot Plate แบบที่ขยับไม่ได้ แต่เป็นส่วนของที่นั่ง (Seat) ที่ขยับแทน ทำให้การมองจุดหมุนอยู่ที่ปุ่มโคนหัวแม่เท้า (Ball of the Foot) เหมือนดังเช่นที่หนังสือมักกำหนดให้เป็นจุดหมุน และเป็นระบบคานในรูปแบบที่ 2
มากไปกว่านี้หากเราเปลี่ยนมุมมองให้ แรงต้าน (Resistance) เกิดจากแรงปฏิกริยา (Reaction Force) ที่เกิดขึ้นที่จุดหมุน จะเป็นคำถามตามมาว่า เมื่อมีแรงกระทำผ่านจุดหมุน แรงนั้นแท้ที่จริงควรไม่มีผลใดๆใช่หรือไม่?

เมื่อมีคำถามที่ว่า Push Up เป็นระบบคานแบบใด คำตอบนั้นมักจะตอบว่าเป็น ระบบคานรูปแบบที่ 2
โดยมีปลายเท้าเป็นจุดหมุน และมี Center of Mass (เส้นสีแดง) เป็นแรงต้าน สังเกตุว่าจากกรณีที่ยกตัวอย่างมาทั้งหมด จะพบว่าหลักการในการกำหนดจุดหมุน ที่ในบางแหล่งข้อมูล กำหนดไว้ว่า
จุดหมุน = ข้อต่อที่กล้ามเนื้อที่กำลังพิจารณาอยู่พาดไปเกาะ
นั้นถูกเปลี่ยนให้กลายเป็น ปุ่มโคนหัวแม่เท้า และ กลายเป็นนิ้วเท้า ประเด็นนี้ผู้เขียนจึงอยากชี้ให้เห็นถึงหลักความไม่แน่นอนในการกำหนดจุดหมุน และความกำกวม ของการนำระบบคานในเครื่องกลอย่างง่าย มาเทียบเป็นระบบคานในร่างกายมนุษย์